如何设置pid参数PID参数整定是一个复杂的过程,一般需要根据对象慢慢进行。Z-N法在什么情况下可以用来整定PID参数?PID的主要作用是什么?为了缩短整定时间,需要注意以下几点:①根据被控对象的特性确定初始参数值PB、Ti、Td,扩展信息:1,参数整定:PID控制器的参数整定是控制系统设计的核心内容。
1、PID参数怎样调整最佳?
PID参数整定方法是确定调节器的比例带PB、积分时间Ti和微分时间Td。一般可以通过理论计算确定,但误差太大。目前应用最广泛的工程整定方法有:经验法、衰减曲线法、临界比例带法和响应曲线法。每种方法的一般过程如下:(1)经验法也叫现场试凑法,即先确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加一个扰动,通过现场观察判断控制曲线的形状。
如果调节器是PID三作用型,那么应在调节PB和Ti的基础上增加微分作用。因为差动有抵抗偏差变化的能力,所以在确定一个Td值后,可以将设定的PB、Ti值降低一点再现场试,直到PB、Ti、Td得到最佳值。显然,经验方法设定的参数是准确的。但是需要更多的时间。为了缩短整定时间,需要注意以下几点:①根据被控对象的特性确定初始参数值PB、Ti、Td。
2、什么是PID控制?其主要用途是什么?PID各项的主要作用是什么
pid是比例、积分、微分的缩写。比例调节功能:反映系统在比例上的偏差。一旦系统出现偏差,比例调节立即产生调节功能以减小偏差。比例大可以加快调节速度,减少误差,但比例过大会降低系统的稳定性,甚至造成系统的不稳定。积分调节的作用是使系统消除稳态误差,提高无误差度。因为有误差,所以会进行积分调整,直到没有误差为止,积分调整停止。
积分的强度取决于积分时间常数ti,ti越小,积分越强。反之,如果ti较大,则积分效应较弱,加入积分调节会降低系统的稳定性,减缓动态响应。积分作用通常与另外两个调节规律结合起来形成pi调节器或pid调节器。PIDportID,在STP(生成树协议)中,如果端口收到的BPDU中的BID和pathcost相同,比较PID选择阻塞端口。
3、PID各参数的一般原则、调整方法和步骤是什么?
PID调试的一般原则:a .在输出不振荡的情况下,提高比例增益p。b .当输出不振荡时,降低积分时间常数ti。c,当输出不振荡时,增加微分时间常数Td。一般可以通过理论计算确定,但误差太大。目前应用最广泛的工程整定方法有:经验法、衰减曲线法、临界比例带法和响应曲线法。每种方法的一般流程如下:1 .确定比例增益P时,首先去掉PID的积分项和微分项,一般用Ti0和Td0(详见PID的参数设置说明)进行PID纯比例调节。
4、如何通俗地解释PID参数整定
1。PID常用公式:找到最佳参数设置,按从小到大的顺序查。先按比例积分后,再加微分。曲线震荡频繁,比例带盘需要放大。曲线在大湾附近浮动,比例带盘向小尺度移动,所以曲线偏离慢,积分时间减少,曲线波动周期长,积分时间较长,曲线振荡频率快。第一,降低差速器,动态差大。
T180~600s,D3180s压力P:P30~70%,T24~180s,液位L:P20~80%,T60~300s,流量L:P40~100%,T6~60s。3.PID控制的原理和特点在工程实践中,应用最广泛的调节器控制规律是比例、积分和微分控制,简称PID控制,也称为PID调节。PID控制器自问世以来已有近70年的历史,因其结构简单、稳定性好、运行可靠、调节方便而成为工业控制的主要技术之一。
5、如何从理论上分析pid参数的物理意义
1。比例部分:PID是比例、积分、微分的缩写。PID控制的难点不在于编程,而在于控制器的参数设置。增加比例系数使系统灵敏,加速调节并减少稳态误差。但如果比例系数过大,超调量增大,振荡次数增加,调节时间延长,动态性能变差,如果比例系数过大,闭环系统甚至会不稳定。简单的比例控制难以保证适当的调节和完全消除误差。
当温度低于设定值时,误差为正,积分项增大,使加热电流逐渐增大,反之积分项减小。因此,只要误差不为零,控制器的输出就会因为积分而不断变化。积分平差的“大方向”是正确的,积分项可以减少误差。直到系统处于稳态,当误差始终为零,比例部分和微分部分都为零时,积分部分就不再变化,正好等于稳态所需的控制器输出值。所以积分部分的作用是消除稳态误差,提高控制精度,积分作用一般是必须的。
6、什么情况下可以用Z-N法整定PID参数,整定效果如何?
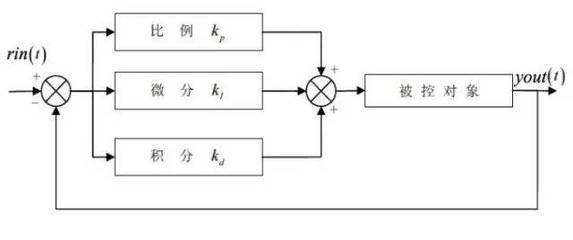
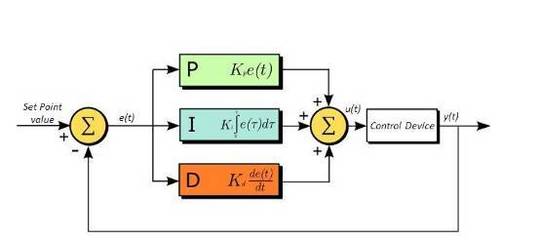
PID控制器是一种线性控制器,基于输入值Rin(t)和输出值Yout(t)组成的偏差e(t)的控制器各校正环节的作用如下:(1)比例环节:它按比例反映控制系统的偏差e(t),一旦产生偏差,控制器会立即动作以减小偏差。(2)积分环节:主要用于消除静态误差,提高系统的误差程度。积分的强度取决于积分时间常数Ti。Ti越大,整合效应越弱,反之亦然。
7、pid参数是如何整定的
PID参数的整定是一个复杂的过程,一般需要根据对象慢慢进行。常用的方法有两种:扩展临界比例带调谐法和扩展响应曲线法。1.模拟PID算法中的多线数字PID是在模拟PID算法的基础上,用差分方程代替连续方程。可以在数字PID操作中使用有效的方法。2.随着计算机控制技术的发展,数字PID控制得到了很大的发展。这些算法对增量型和位置型都适用,算法的选择主要取决于执行器。
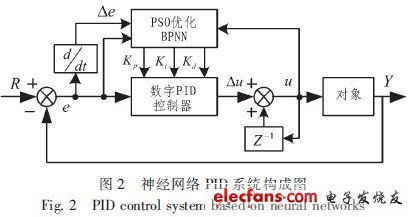
扩展信息:1。参数整定:PID控制器的参数整定是控制系统设计的核心内容,根据被控过程的特点,确定PID控制器的比例系数、积分时间和微分时间。PID控制器参数整定的方法有很多种,可以归纳为两大类:一类是理论计算整定法,它主要是根据系统的数学模型,通过理论计算来确定控制器参数。2.一种适合计算机控制的简单方法——简化扩展临界比例带调谐法,是由RobertsP提出的,d 1974年。